
Le multicopter Hovership MHQ2 est un quadcopter télécommandé dont la base est imprimée en 3D. Il s’agit à l’origine d’un petit « racer » FPV (First Person View : vue à la première personne) sorti il y a plusieurs années, mais il sera parfait pour découvrir la technologie qui se cache derrière ce pan de l’aéromodélisme.
Le but de ce tutoriel est de vous accompagner dans la fabrication et la configuration du drone, car de nombreuses options existent et ce n’est pas aussi simple qu’il n’y paraît pour le néophyte. Je ne vous parlerais ni de réglementation, ni de pilotage, simplement de la fabrication !
NB : les nombreux liens vers ebay que vous trouverez dans ce tutoriel sont des liens d’affiliations, permettant de rémunérer le blog. Il ne vous en coûtera pas plus cher de les utiliser si vous souhaitez fabriquer votre drone et vous soutiendrez la rédaction de nouveaux tutoriels… d’avance merci !
Liste des pièces
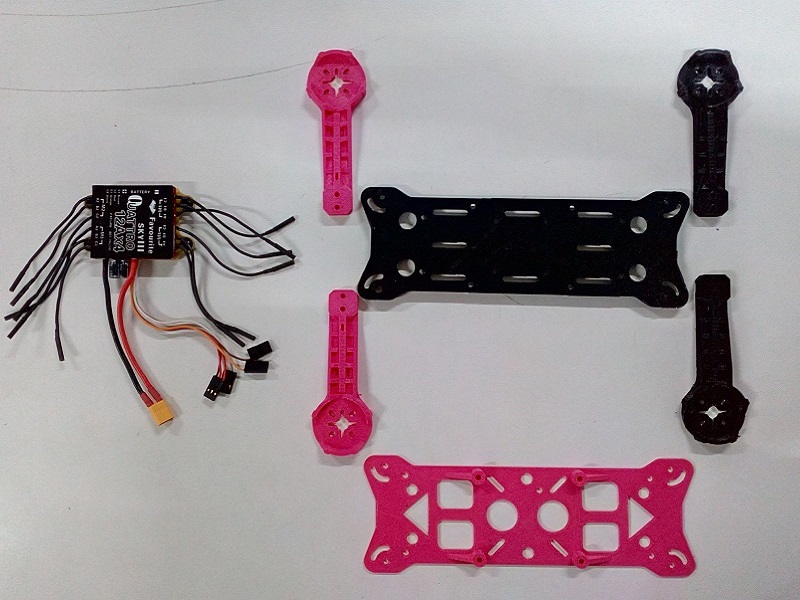
Pour fabriquer votre drone, vous aurez besoin, outre les pièces de la structure imprimables en 3D, d’un ensemble de composants électroniques et d’accessoires communément utilisés dans l’aéromodélisme.
Vous pouvez les acheter sur des sites spécialisés, mais vous trouverez souvent des prix plus intéressants sur la plateforme de vente eBay. Au total, vous vous en tirerez pour un peu moins d’une centaine d’euros (sans la télécommande, ni les pièces imprimées en 3D)… à condition de savoir quoi chercher !
Pour votre drone, vous aurez besoin de :
- 1x contrôleur de vol NAZE 32 4 canaux : achetez-le sur ebay. Préférez une version incluant une puce GPS et un baromètre, votre drone sera plus facile à piloter, et la différence de prix est négligeable !
- 4x moteurs ZMR 1804 2400kV (2 CW « clockwise » et 2 CCW « counter clockwise »). Achetez-les sur ebay. Ainsi que les hélices qui vont bien (préférez-les en 5″ et prenez-en un bon nombre, vous en aurez besoin !!!).
- 1x ensemble de télécommande RC incluant émetteur/récepteur de 2.4Ghz type Turnigy 9X : achetez la sur ebay. Vous avez le choix entre deux modes, selon le stick de contrôle des gaz que vous préfèrerez (mode 1: gaz à droite, mode 2: gaz à gauche). En ce qui me concerne, j’ai pris un mode 2, mais tout est paramétrable via le logiciel BaseFlight, comme nous le verrons plus loin.
- 1x carte de distribution de puissance Favorite SKY III : achetez la sur ebay.
- 12x connecteurs banane mâles pour les moteurs : achetez-les sur ebay.
- 1x batterie compacte type « ZIPPY 25C Series » de 1300mAh : achetez-la sur ebay.
- 1x connecteur mâle pour batterie RC : achetez-les sur ebay.
- 6x amortisseurs en caoutchouc type « ATG » : achetez-les sur ebay.
Pensez également à acheter un chargeur pour la batterie (le drone est assez lourd, et consomme par conséquent beaucoup d’énergie) : prenez par exemple un chargeur imaxRC B3 adapté à votre batterie (3*800mA). Achetez-le sur ebay pour seulement quelques euros.
Vous aurez par ailleurs besoin d’un assortiment de visserie (M2 pour les moteurs, M3 pour la structure) avec écrous et rondelles. Je vous conseille de les choisir en nylon : elles seront suffisamment solides pour nos besoins, mais plus légères. Vous gagnerez ainsi en autonomie de vol et en agilité. Il vous faudra également des entretoises en nylon pour fixer le dernier étage.
Vous n’aurez aucun mal à trouver des assortiments sur Internet (ce kit sur ebay par exemple). Pour fixer les moteurs, vous aurez besoin de 16x vis nylon M2 de 6mm (en vente sur ebay). Bien sûr, vous avez peut-être déjà ça au fond d’un tiroir, n’hésitez pas à adapter au besoin.
Impression 3D de la structure
Pour commencer, et en attendant que votre électronique vous soit livrée, il vous faudra imprimer les différentes pièces qui constituent la structure du drone. Je me suis basé sur les plans du MHQ2 de Hovership (que l’on ne trouve plus sur leur site web malheureusement), mais vous pouvez encore trouver les modèles des pièces à imprimer au format .STL sur Thingiverse.
Si le design ne vous plait pas, vous trouverez plein d’autres modèles de drones à imprimer en 3D sur cet article de cults3D.com. Le principe reste le même, alors faites-vous plaisir !
Le gros de la structure peut s’imprimer avec un remplissage de 40%, mais pour les bras et le train d’atterrissage, il vaut mieux partir sur du 60%. Si vous n’avez pas d’imprimante 3D, je peux vous imprimer les pièces moyennant une petite participation financière et les frais de port. Contactez-moi !

Assemblage
Le MHQ2 est décomposé en plusieurs platines avec des bras pouvant être repliés pour faciliter le transport. Chaque platine est utilisée pour y fixer une carte électronique, les plus lourdes devant se trouver idéalement au dessous des hélices pour stabiliser l’ensemble.
Phase 1 : bras et carte de puissance
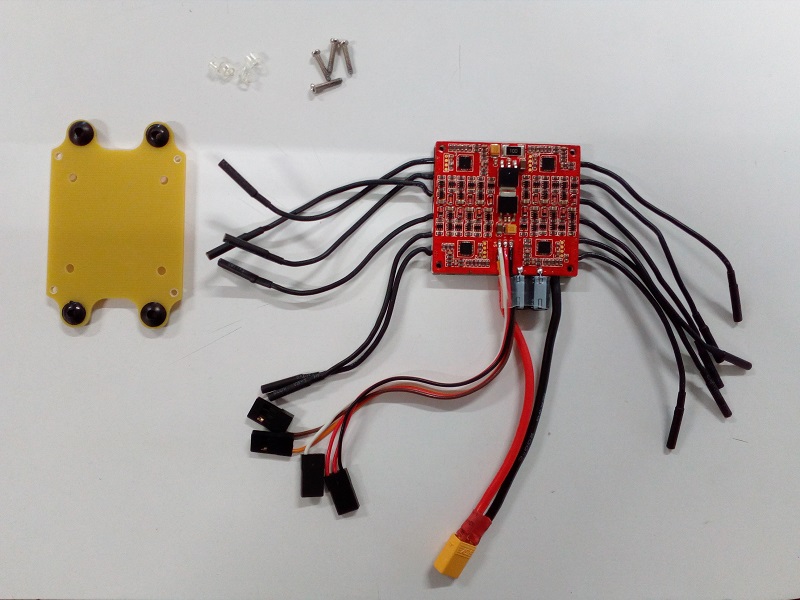
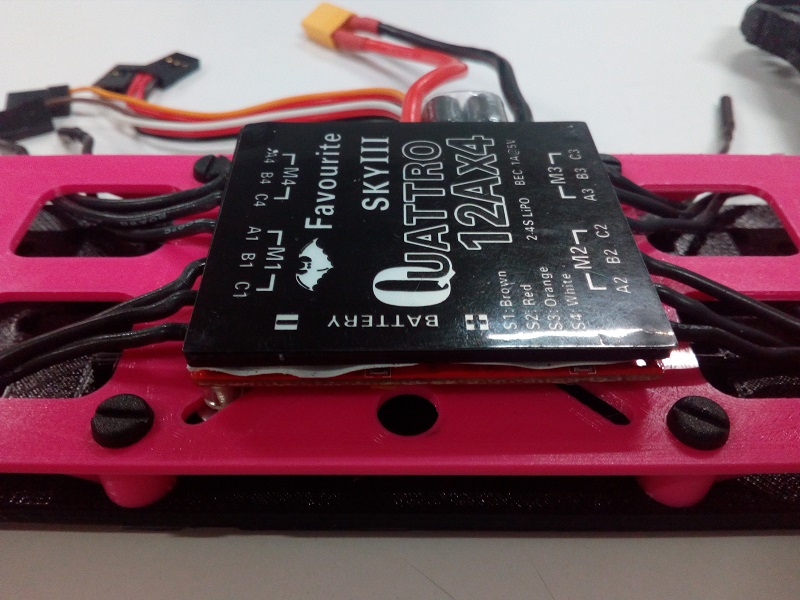
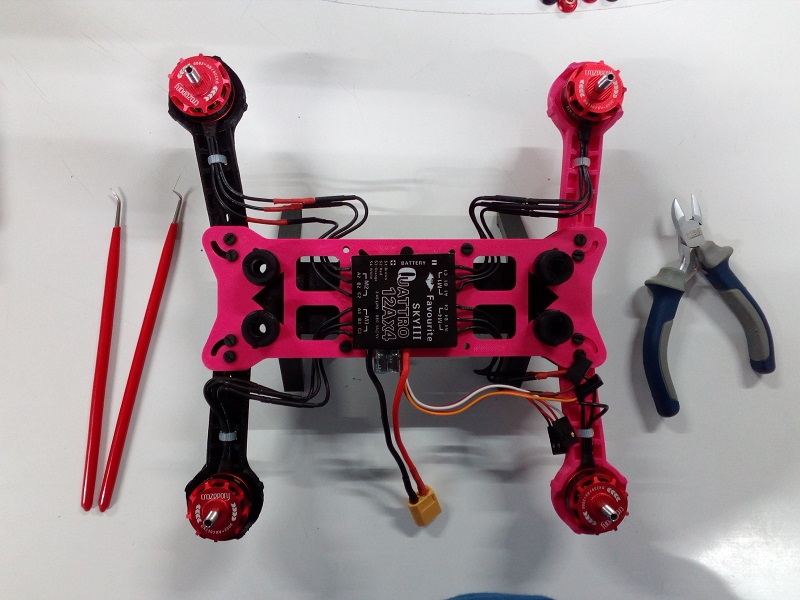
La carte la plus lourde, la FR SKY III qui distribue la puissance, s’installe sur la platine supérieure de la base. Cela lui permet d’être au plus près des moteurs et juste en dessous des hélices, ce qui va stabiliser le vol.
Avant toute chose, je vous invite à retirer de la carte la plaque de protection de l’électronique, qui va alourdir l’ensemble. Votre carte sera de toute manière bien protégée par la platine imprimée en 3D… pas de soucis à se faire ! Retirez les 4 vis et conservez-les… elle vous serviront à fixer la carte sur la platine. Utilisez les trous en forme de croix, au travers desquels vous passerez deux vis que vous venez de récupérer, en prenant soin d’y placer des rondelles. Passez les câbles des moteurs dans les trous de la platine prévus à cet effet.

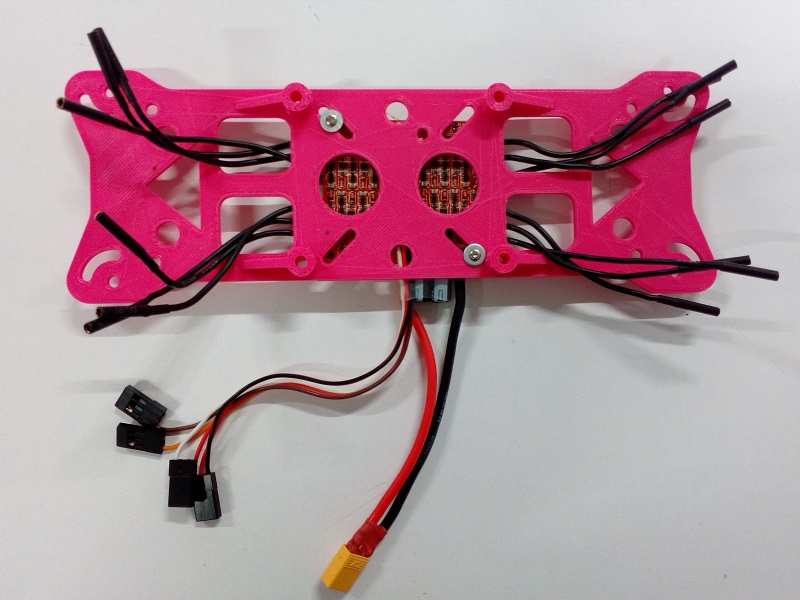
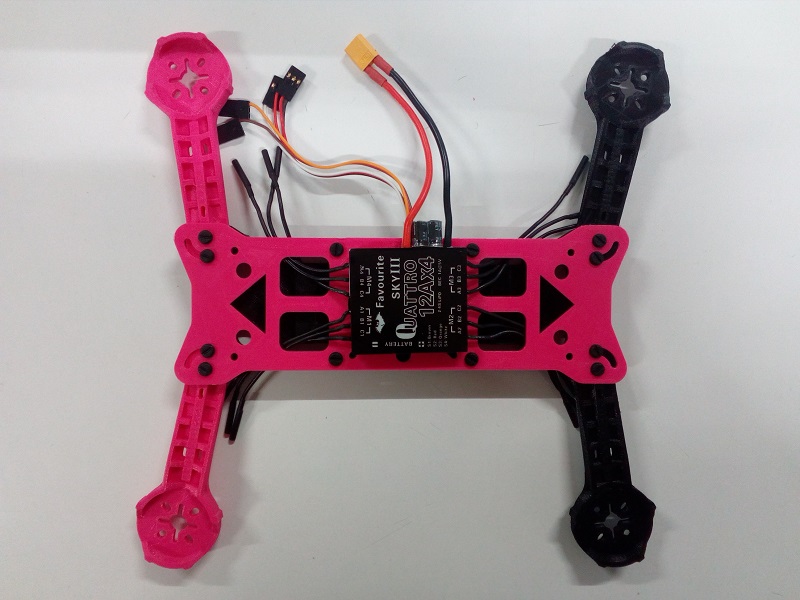
Passez ensuite à l’installation des bras qui soutiennent les moteurs. Ceux-ci sont pris en « sandwich » entre les deux platines de la base et maintenus par un jeu de vis, de rondelles et d’écrous type « M3 ». Préférez une visserie en nylon, plus légère. Vissez également les deux platines ensemble à l’aide de 4 vis et écrous M3. Si vous le souhaitez, vous pouvez utiliser du frein filet (du 242 par exemple, pas besoin qu’il soit trop fort) pour éviter que les vibrations ne finissent par donner du jeu à l’ensemble. Ce n’est pas indispensable, mais toujours utile. Vous en trouverez sans problème sur ebay.


Phase 2 : moteurs
Maintenant que les bras sont en place, il est temps d’installer les moteurs. Ceux-ci sont de deux sortes : des CW (« clockwise » : rotation dans le sens des aiguilles d’une montre) et des CCW (« counter clockwise » : en gros, l’autre sens). En fait, il ne s’agit pas du sens de rotation du moteur, qui, selon les branchements effectués, peut tourner dans un sens ou dans l’autre, mais bien du type de pas de vis utilisé. En effet, selon le sens de rotation du moteur, le pas de vis devra être inversé pour éviter que les écrous maintenant les hélices ne se dévissent et que celles-ci s’envolent, entraînant un crash immédiat et certainement très spectaculaire de votre drone.
Vous n’êtes pas sans savoir qu’une hélice tournant à grande vitesse entraîne un couple de réaction, qui à tendance à entraîner l’appareil en rotation inverse. Un hélicoptère va compenser ce couple à l’aide d’un rotor de queue, dans la grande majorité des cas. Une autre solution est de placer une seconde hélice, tournant en sens inverse, et créant un contre-couple qui va équilibrer le mouvement et stabiliser l’ensemble. C’est la solution adoptée par les quadcopters, dont les moteurs sont inversés par paires opposées comme indiqué sur ce schéma :
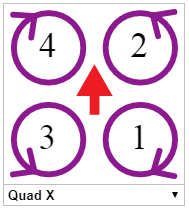
Comme vous pouvez le voir, les moteurs opposés 1 et 4 tournent dans le sens des aiguilles d’une montre, alors que les moteurs 2 et 3 tournent en sens inverse. C’est ce qui permet à la fois d’équilibrer le vol et de jouer sur l’axe de lacet du drone (en accélérant un couple de moteur tout en ralentissant le couple opposé, et vice versa). Il est donc crucial de respecter ce sens et par conséquent d’installer les moteurs correspondants. Concrètement, vous devrez installer les moteurs équipés d’un pas de vis inversé (notés « R »), en position 2 et 3.
Vous remarquerez peut être que la position des moteurs indiqués sur la carte FR Sky III n’est pas la même que sur le schéma. Pas de soucis, nous pourrons régler le problème plus tard en modifiant les branchements sur la carte Naze 32 de manière très simple.
Attention ! Il est fort probable que vos moteurs vous soient livrés sans connecteurs. Il vous faudra donc souder les connecteurs « banane ». Je vous conseille de réaliser cette opération avant d’installer les moteurs, ce sera plus facile. Pensez également à utiliser de la gaine thermo pour aider à maintenir les connecteurs en place et empêcher tout court-circuit : n’oubliez pas qu’ils vont être soumis à d’importantes vibrations.
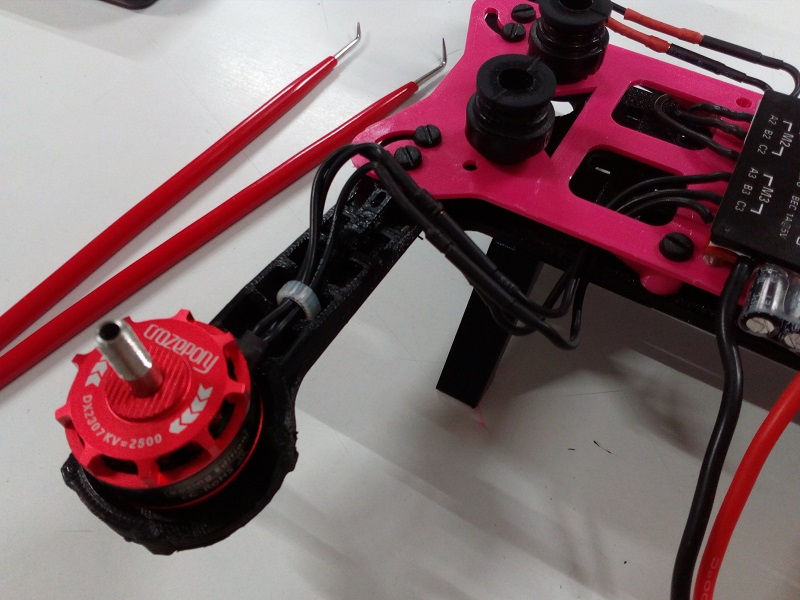
Vous pouvez ensuite fixer les moteurs sur les bras à l’aide des vis fournies. Les bras disposent de différents trous de fixation, à vous d’utiliser les plus pratiques selon la version de vos moteurs. Si besoin agrandissez ou percez des trous supplémentaires à la perceuse (allez y doucement pour ne pas fondre le plastique).
Connectez ensuite vos moteurs à la carte de puissance (le plus simple est de brancher les câbles dans le même ordre de sortie de la carte… vous pouvez inverser deux câbles pour inverser le sens de rotation du moteur si besoin, mais nous verrons cela plus loin).
Une fois en place, vous pouvez fixer les câbles sur le bras avec un collier, pour éviter qu’ils ne s’accrochent partout. Inutile de fixer les hélices pour le moment, vous risqueriez de les abîmer en manipulant le drone et nous testerons les moteurs sans elles de toute façon.



Phase 3 : étage supérieur – carte de contrôle
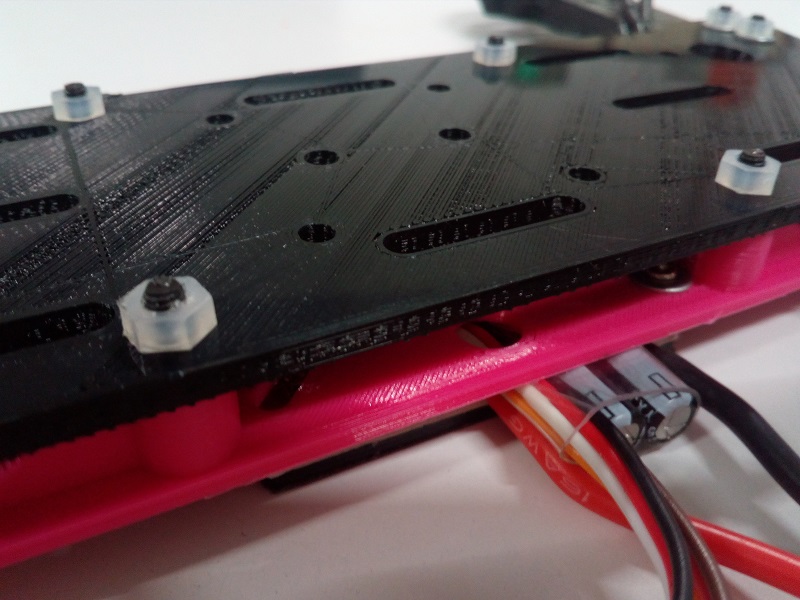
Vous pouvez maintenant passer à l’installation de la platine destinée à accueillir la carte de contrôle et la batterie. Celle-ci est connectée à la base à l’aide de 6 absorbeurs de chocs en caoutchouc, qui permettent de réduire les vibrations subies par l’accéléromètre et le gyroscope, et donc d’optimiser le fonctionnement de la carte en mode stabilisé.
Notez que selon la taille de votre carte de puissance, celle-ci risque de vous empêcher de placer les absorbeurs de chocs centraux. Auquel cas, il vaut mieux installer la platine de puissance entre les deux platines de la base. Pas de problème : il vous suffit de dévisser la platine de base inférieure et de déplacer la carte de puissance. Profitez-en pour installer les absorbeurs de chocs, ce sera plus facile avec la base retirée.
Une fois vos 6 absorbeurs en place (non, ne négligez pas ceux du milieu : ils sont indispensables pour un vol stabilisé), vous allez installer la platine destinée à accueillir la carte de contrôle Naze 32. Pas si simple : il vous faudra passer les absorbeurs de chocs dans les trous de la platine de contrôle. Vous pouvez vous aider d’une pince à épiler ou d’un petit poinçon, mais attention à ne pas les déchirer, ils sont fragiles !
Une fois la platine en place, installez quatre entretoises en nylon de 10mm, filetage en haut, en les maintenant par des vis sous la platine. Positionnez votre carte Naze 32, idéalement avec la flèche vers l’avant. Si ce n’est pas possible, pas de problème, l’orientation de la carte peut être modifiée lors de la config. En revanche, assurez-vous que le connecteur USB est accessible.
Une fois positionnée, fixez la carte avec des écrous en nylon, puis connectez les câbles de commande de l’ESC en prenant soin de respecter la polarité de l’alimentation (marquée sur la carte Naze 32). Enfin, prévoyez le câblage pour le récepteur radio en PPM (multiplexage des canaux) sur la carte Naze 32 : pour ce faire, connectez un câble triple comprenant l’alimentation (rouge et noir) et le signal PPM (généralement blanc) sur le côté de la Naze 32.




Phase 4 : finitions – FPV
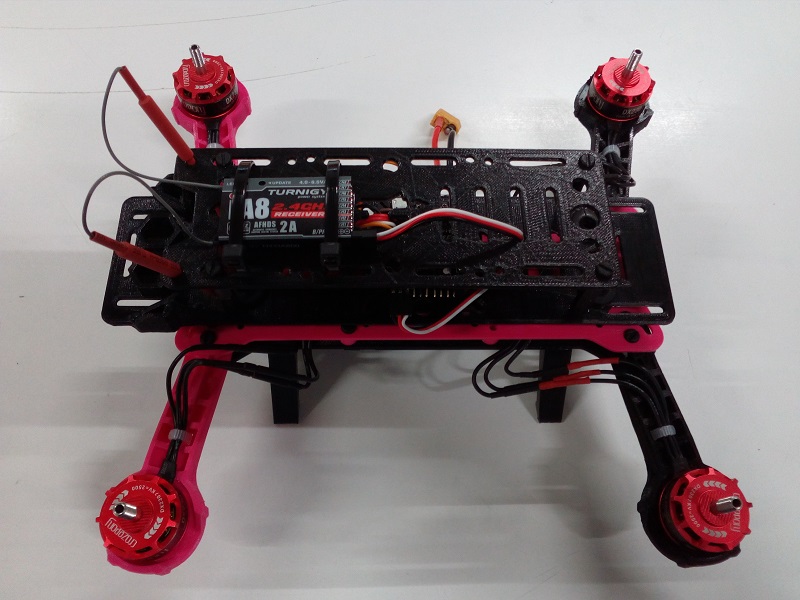
Il est temps de passez à la finition, c’est-à-dire la platine supérieure destinée à accueillir le récepteur radio et l’antenne « FPV ». Pour le moment, nous allons nous contenter de placer le récepteur radio. Pour cela, repérez les trous de fixation de la platine supérieure et fixez des entretoises en nylon de 15mm en utilisant les trous de même niveau sur la platine de contrôle. Utilisez des vis en nylon pour maintenir les entretoises, filetage en haut. Doublez les entretoises si nécessaire.
Positionnez la platine supérieure en faisant passer les filetages des entretoises dans les trous de fixation et maintenez la platine avec des écrous en nylon. Faites passer le câble destiné au récepteur par une ouverture de la platine et connectez-le à la connectique « PPM » du récepteur (attention à bien respecter la polarité!). Fixez le récepteur avec un collier sur le haut de la platine.
Bravo, l’assemblage est terminé !
Electronique et configuration
Phase 1 : Installation de BetaFlight
Nous allons utiliser le logiciel libre et gratuit « BetaFlight » pour configurer notre carte de contrôle. Ce logiciel est disponible en tant qu’application pour le browser Chrome et est disponible ici. Vous aurez par conséquent besoin d’un browser Chrome ou compatible (Avast par exemple) pour pouvoir utiliser Betaflight.
Cliquez sur le bouton « Ajouter à Chrome » puis lancez l’application via l’onglet ![]() de votre browser.
de votre browser.
Phase 2 : Mise à jour du firmware de la carte de contrôle
La première étape de configuration de votre drone consiste à mettre à jour la carte de contrôle avec la dernière version du Firmware.
Pour flasher le firmware avec Baseflight, ouvrez le logiciel puis court-circuitez les deux PINs « Boot » de votre carte (avec un tournevis plat par exemple) avant de la brancher sur votre ordinateur avec un câble USB. Vous devriez obtenir une LED bleue fixe, indiquant que la carte est en mode « écriture ».
Cliquez alors sur le bouton « Firmware Flasher » en bas à droite de l’interface Baseflight puis cliquez sur « Load Firmware [local] » pour charger votre firmware (Attention, il faut utiliser le firmware correspondant au bon logiciel et à la bonne carte!).
Une fois la manip effectuée, la carte reboote et vous pouvez ensuite vous y connecter (elle affiche une LED verte). Si jamais vous faites une fausse manipulation, il est possible de « planter » la carte (ça m’est arrivé). Heureusement, le bootloader est protégé contre l’écriture et vous pourrez donc faire une autre mise à jour qui devrait tout réparer. Si vous avez du mal, essayez de flasher le Firmware en laissant les PINs « Boot » court-circuitées jusqu’au bout (auquel cas, soudez carrément deux câbles reliés par un domino par exemple, ça sera beaucoup plus facile).
Modes de vol
ANGLE : permet de stabiliser le vol en limitant l’inclinaison et en se basant sur les infos de l’accéléromètre et du gyroscope.
HORIZON : mode semi-stabilisé qui utilise le mode ANGLE lorsque les sticks sont proches du centre et qui passe en mode ACCRO dans les extrêmes.
ACCRO : mode accrobatique (par défaut sur Bétaflight) qui permet de réaliser des tonneaux et flips. Pour pilotes chevronnés !
Cet article est en cours de rédaction… visitez-le régulièrement et n’hésitez pas à me poser des questions si certains sujets n’y sont pas encore abordés !


Merci. Tuto pratique pour faire décoller son drone facilement.
Merci pour votre commentaire ! J’ai jeté un œil à votre site, très intéressant avec de nombreux tutoriels. Super !